
Die Arbeitsgruppe beschäftigt sich mit computer- und roboterassistierten Verfahren in der Kopf-Hals-Chirurgie. Schwerpunkte sind die Etablierung neuer Verfahren, die Erweiterung des Indikationsspektrums im HNO-ärztlichen Fachgebiet sowie die Optimierung vorhandener Systeme. Die Klinik steht dabei in Kooperation mit verschiedenen Herstellerfirmen und technischen Lehrstühlen, um die Entwicklung neuer Prozeduren und Instrumente zu beschleunigen. Durch die sehr gute Infrastruktur am Universitätsklinikum Ulm besteht Zugriff auf modernste Technik und innovative chirurgische Assistenzsysteme.
Systementwicklung
sMAC-System. Auf Basis eines cMAC-Videolaryngoskops (Storz) und flexiblen Operations-Instrumenten (Lumendi) wird ein neuartiges System zur Larynxchirurgie entwickelt. Die Vorteile des Systems sind die intuitive Handhabung und die einfache Herstellung aus klinisch erprobten Medizinprodukten. Die Entwicklung erfolgt in enger Kooperation mit dem Continuum Robotics Laboratory (CRL) und dem Department of Mathematical and Computational Sciences an der University of Toronto Mississauga, Kanada. Das Projekt wird gefördert durch die Deutsche Forschungsgemeinschaft (DFG).
PET-MRT bei Kopf-Hals-Karzinomen. Im Rahmen einer klinischen Pilotstudie werden Patienten mit Kopf-Hals-Karzinom vor und nach einer primären Radiochemotherapie einer PET-MRT-Untersuchung mit FDG-Tracer unterzogen. Möglicherweise kann mit den Daten, welche mit dem combined diffusivity metabolic index ausewertet werden, eine prognostische Aussage für die Patienten getroffen werden.
Laser-Chirurgie. Gemeinsam mit dem Institut für Lasertechnologien in der Medizin und Messtechnik der Universität Ulm werden die Eigenschaften des neuartigen gepulsten Er:YAG-Lasers untersucht. Hierfür werden ex vivo-Experimente durchgeführt, mit denen die Schneide-Eigenschaften mit dem routinemäßig verwendeten CO2-Laser verglichen werden.
Die biomechanischen Eigenschaften von Karzinom-Gewebe werden in Kooperation mit dem Institut für Biomechanik und unfallchirurgische Forschung an der Universität Ulm erforscht. Hierfür wird humanes Tumorgewebe ex vivo mittels Stress-Relaxierungs-Tests auf den Aggregatmodus, die hydraulische Permeabilität und den Equilibrium Modulus untersucht. Unterschiede zum gesunden Referenzgewebe werden aufgezeigt.
Die Technik der Virtual Reality (VR) wird in einer klinischen Studie eingesetzt. Patienten, welche eine Operation in Lokalanästhesie erhalten, wird der intraoperative Einsatz einer VR-Brille angeboten. Untersucht wird das Auftreten von Ängsten und Entspannungsgefühlen.
Bei der chirurgischen Therapie von Kopf-Hals-Tumoren wird die Technik der Fluoreszenz-Bildgebung und der Hyperspektral-Bildgebung evaluiert. Zum Einsatz kommt hierbei ein hochmodernes Fluoreszenz-Mikroskop (Kinevo). Somit soll die Erkennbarkeit der Tumoren verbessert und der Operateur beim sicheren Durchführen der Operation unterstützt werden.
Das uRALP-System ist im Rahmen einer EU-geförderten Initiative für die transorale Laserchirurgie entwickelt worden (www.microRALP.eu). Nach Abschluss der Finanzierung konnte die HNO-Uniklinik Ulm zur weiteren Entwicklung des Systems an der Medizinischen Hochschule Hannover durch präklinische Anwenderstudien beitragen.
Leitung der AG Robotik

Weitere Mitarbeiter:
- Prof. Dr. J. Greve
- Prof. Dr. M. Scheithauer
- Prof. Dr. F. Sommer
- Dr. F. Böhm
- Dr. R. Lehner
- Dr. C. Schwamborn
- cand. med. L. Schild
- cand. med. L. Kienle
- cand. med. dent. L. Tippelt
Haptik und taktiles Feedback
Das DaVinci System (Intuitive Surgical, Sunnyvale, USA) ist das bekannteste für Roboter-assistierte Eingriffe zugelassene System. Es wird von verschiedenen Fachrichtungen regelmäßig für operative Eingriffe verwendet. Neben dem erhöhten Kostenaufwand ist das Defizit der Haptik und des taktilen Feedbacks ein weiteres Hindernis für die breitere Anwendung des Systems. Unsere Arbeitsgruppe untersucht diese Umstände, um mögliche Verbesserungen für die Anwendung im Kopf-Hals-Bereich zu erreichen. Durch seine vielfältigen hochempfindlichen anatomischen Strukturen stellt der Halsbereich stets besondere Anforderungen an den Operateur und das Instrumentarium. Gemeinsam mit den Kooperationspartnern aus dem Institut für Biomechanik und unfallchirurgische Forschung an der Universität Ulm werden eigens experimentelle Modelle entwickelt, um das taktile Feedback der verfügbaren Assistenzsysteme zu objektivieren. In einem weiteren Projekt erfolgt die Untersuchung der haptischen Eigenschaften von humanem Tumorgewebe. Auch diese Experimente haben zum Ziel, dass Tumorgewebe während einer Operation mit robotischen Hilfsmitteln besser erkannt und lokalisiert werden kann. Diese Arbeiten wurden mit dem Mobilitätsstipendium der dt. Gesellschaft für Computer- und Roboterassistierte Chirurgie ausgezeichnet.
i2Soul Initiative. Die Robotik-Arbeitsgruppe führt eine enge Kooperation mit der i2Soul-Initiative der Universität Ulm. Die Initiative fördert die Wissenschaft im Bereich der chirurgischen Onkologie und ist ein Zusammenschluss der chirurgischen Fachrichtungen an der Universitätsklinik Ulm (Hals-Nasen-Ohrenheilkunde, Kopf-Hals-Chirurgie; Gynäkologie; Unfallchirurgie; Urologie).
BHS-Technologies. Das digitale Mikroskop RoboticScope hat die CE-Zulassung 2020 erhalten. Unsere Arbeitsgruppe hat bislang an den Validierungsstudien teilgenommen sowie präklinische Experimente an der lateralen Schädelbasis und zur mikrovaskulären Chirurgie durchgeführt. Weiterhin wurden klinische Eingriffe, wie Cochlea-Implantate und mikrovaskuläre Anastomosen durchgeführt.
Medineering. Der computer-gestützte Endoskop-Halter ‚Cirq‘ der Firma Brainlab-Medineering hat 2017 die CE-Zulassung für Operationen im Kopf-Hals-Bereich erhalten. Unsere Arbeitsgruppe hat sowohl mit präklinischen Experimenten an der vorderen Schädelbasis als auch mit klinischen Untersuchungen an den Tränenwegen zu der Entwicklung des Systems beigetragen.
Medrobotics. Von 2010 – 2016 bestand eine enge Kooperation mit der Firma Medrobotics (Raynham, USA). Unsere Arbeitsgruppe hat die Entwicklung, Optimierung und klinische Einführung des Flex Systems von Beginn an begleitet und war gemeinsam mit drei weiteren Standorten die erste Klinik weltweit, in dem das System am Patienten eingesetzt wurde. Im Vorfeld wurde das Flex System in multiplen Kadaverstudien erprobt und weiterentwickelt. In der klinischen Phase-I Studie zur Anwendbarkeit und Sicherheit des Systems (NCT02262247) konnten am Ulmer Zentrum 14 onkologische Patienten erfolgreich behandelt werden. Die Ergebnisse der Studie waren die Basis für die Zulassung des Systems in den USA. Das Projekt wurde 2015 mit dem 'Kooperationspreis Wissenschaft Wirtschaft' der Universität Ulm ausgezeichnet.
Fazit
Die Entwicklung der computer- und roboterassistierten Operationsverfahren verspricht auch im Kopf-Hals-Bereich ein großes Potential zur Verbesserung der Patientenversorgung. Allerdings haben sich die diversen Systeme besonders aufgrund der finanziellen Belastung und auch aufgrund des begrenzten tatsächlichen Mehrwerts bisher nicht in der Routine durchsetzen können. Das Ziel unserer Arbeitsgruppe ist somit die Entwicklung von roboter-assistierten Assistenzsystemen, welche dem Patienten einen klaren Nutzen bringen und ökonomisch sinnvoll einsetzbar sind.

Durch eigens entwickelte Messaufbauten werden die haptischen Eigenschaften computer- und roboterassistierter Operationssysteme evaluiert.
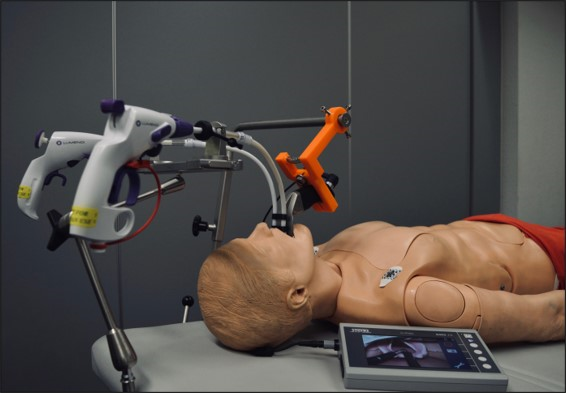
Chirurgisches Assistenz-System sMAC auf Basis eines Videolaryngoskops und flexiblen Operationsinstrumenten.
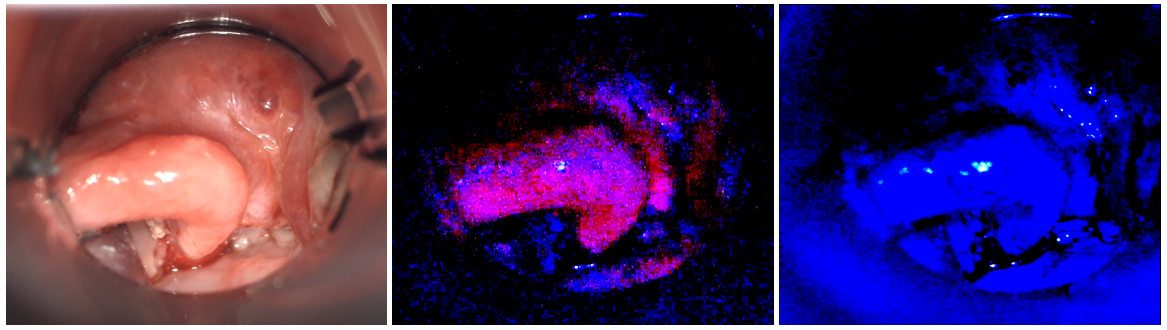
Einsatz der Fluoreszenz-Technik (5-ALA) bei der operativen Resektion eines Kehlkopf-Tumors
Kooperationspartner:
- Institut für Biomechanik und unfallchirurgische Forschung der Uniklinik Ulm (Dr. A. Seitz)
- Institut für Lasertechnologien in der Medizin und Messtechnik der Universität Ulm (Dr. K. Stock, Dr. H. Wurm)
- Urologische Klinik der Uniklinik Ulm (Prof. Dr. C. Bolenz)
- Institut für Mikroelektronik der Universität Ulm (Prof. Dr.-Ing. M. Ortmanns)
- Continuum Robotics Laboratory (CRL) at Mathematical and Computational Sciences, University of Toronto Mississauga, Canada (Prof. Dr.-Ing. J. Burgner-Kahrs)
- Department of Mathematical and Computational Sciences, University of Toronto Mississauga (Prof. Dr.-Ing. L. Kahrs)
- Institut für intelligente Katheter (INKA) und HNO-Universitätsklinik der Otto-von-Guericke Universität Magdeburg (Dr.-Ing. A. Böse)
- SURAG Medical GmbH – Surgical Audio Guidance (Dr.-Ing. A. Illanes)
- Harvard John A. Paulson School of Engineering and Applied Sciences Harvard University (Prof. R. Wood)
- Fa. Storz (Tuttlingen); Fa. Siemens (München); Fa. Brainlab-Medineering (München); Fa. Lumendi (Buckinghamshire, GB); Fa. BHS-Technologies (Innsbruck, A); Fa. SyncVR Medical BV (Utrecht, NL); Fa. Siemens (München); Fa. Zeiss AG (Oberkochen)
Publikationen der Arbeitsgruppe:
2022
- Wurm H, Schuler PJ, Hausladen F, Grossi A-S, Hoffmann TK, Stock K, Reins EF. Comparative in-vitro investigations on the cutting quality of the CO2 laser and the diode pumped Er:YAG laser. Frontiers in Surgery. Dec 14;8:764450.
- Boehm F, Schuler PJ, Riepl R, Schild L, Hoffmann TK, Greve J. Performance of Microvascular Anastomosis with a New Robotic Visualization System – Proof of Concept. Journal of Robotic Surgery. Jun;16(3):705-713.
2021
- Schild LR, Boehm F, Boos M, Kahrs LA, Coburger J, Greve J, Dürselen L, Hoffmann TK, Schuler PJ. Adding flexible instrumentation to a curved video laryngoscope – a novel tool for laryngeal surgery in an ex vivo animal trial. Laryngoscope. 2021 Feb;131(2):E561-E568.
- Schuler PJ*, Böhm F*, Greve J, Schild L, Hoffmann TK. Robotik in der Kopf-Hals-Chirurgie. Review. HNO. 2021 Feb;69(2):131-139.
- Böhm F, Grässlin R, Theodoraki MN, Schild L, Greve J, Hoffmann TK, Schuler PJ. Current Advances in Robotics for Head and Neck Surgery – a systematic review. Cancers. 2021. Mar 19;13(6):1398.
- Böhm F, Greve J, Riepl R, Hoffmann TK, Schuler PJ. Roboter-assistierte Chirurgie in der Hals-Nasen-Ohrenheilkunde. CME-Artikel. HNO. 2021 Sep;69(9):765-776.
- Kundrat D*, Graesslin R*, Schoob A, Friedrich DT, Scheithauer MO, Hoffmann TK, Ortmaier T, Kahrs LA, Schuler PJ. Preclinical Performance Evaluation of a Robotic Endoscope for Non-Contact Laser Surgery. Ann Biomed Eng. 2021 Feb;49(2):585-600.
- Schild LR, Boehm F, Seitz A, Kahrs LA, Boeckers TM, Greve J, Hoffmann TK, Schuler PJ. Evaluation of a curved surgical prototype in a human larynx. 2021. Eur. Arch. ORL 2021 Aug;278(8):2927-2935.
- Riepl R, Greve J, Schild L, Böhm F, Goldberg-Bockhorn E, Hoffmann TK, Schuler PJ. Application of a new computer-assisted robotic system in cochlear implantation – proof of concept. Int. J. Med. Robot. 2021 Oct;17(5):e2301.
- Böhm F, Greve J, Riepl R, Hoffmann TK, Schuler PJ. Roboter-assistierte Chirurgie in der Hals-Nasen-Ohrenheilkunde. CME-Artikel. HNO. 2021 Sep;69(9):765-776.
2020
- Boehm F, Friedrich DT, Sommer F, Scheithauer MO, Greve J, Hoffmann TK, Schuler PJ. Nasolacrimal duct stenosis – surgery with a novel robotic endoscope positioning system. Int J Med Robot. 2020 Dec;16(6):1-5.
- Schild LR, Lemke D, Boehm F, Greve J, Dürselen L, Scheithauer MO, Hoffmann TK, Schuler PJ. Force effects on anatomical structures in transoral surgery - videolaryngoscopic prototype vs. conventional direct microlaryngoscopy. Current Directions in Biomedical Engineering. 2020. 6(1): 20200021.
2019
- Kundrat D, Schoob A, Piskon T, Grässlin R, Schuler PJ, Hoffmann TK, Kahrs LA, Ortmaier T. Toward Assistive Technologies for Focus Adjustment in Teleoperated Robotic Non-Contact Laser Surgery. IEEE Transactions on Medical Robotics and Bionics. 2019 Aug 1; 1 (3): doi: 10.1109/TMRB.2019.2931438.
2018
- Schuler PJ. Robotic surgery – Who is the Boss? Review. LRO. 2018 Mar;97(S 01):S231-S278.
- Schuler PJ. Neue Partner im OP. Review. Klinik Management Aktuell. 2018.
- Friedrich DT, Dürselen L, Mayer B, Hoffmann TK, Schuler PJ, Greve J. Evaluation of haptic and tactile feedback in transoral robot-assisted surgery – first comparison of competitive techniques. J Robot Surg. 2018 Mar;12(1):103-108.
- Friedrich DT, Modes V, Hoffmann TK, Greve J, Schuler PJ, Burgner-Kahrs J. Teleoperated Tubular Continuum Robots for Transoral Surgery? - Feasibility in a Porcine Larynx Model. Int J Med Robot. 2018. Oct;14(5):e1928.
2017
- Schuler PJ, Hoffmann TK, Veit JA, Rotter N, Friedrich DT, Greve J, Scheithauer MO. Hybrid procedure for total laryngectomy with a flexible robot-assisted surgical system. Int J Med Robot. 2017 Jun;13(2).
- Friedrich DT, Scheithauer MO, Greve J, Doescher J, Hoffmann TK, Schuler PJ. Application of a computer-assisted flexible endoscope system for transoral surgery of the hypopharynx and upper esophagus 2017. Eur Arch ORL. 2017 May;274(5):2287-2293.
- Friedrich DT, Sommer F, Scheithauer MO, Greve J, Hoffmann TK, Schuler PJ. An innovative robotic endoscope guidance system for transnasal sinus and skull base surgery: Proof of Concept. J Neurol Surg B Skull Base. 2017 Dec;78(6):466-472.
- Friedrich DT, Scheithauer MO, Greve J, Hoffmann TK, Schuler PJ. Recent advantages in robot-assisted head and neck surgery. Review. Int J Med Robot. 2017 Jun;13(2).
- Rotter N, Schmitz B, Sommer F, Roehrer S, Schuler PJ, Bischof F, Hoffmann TK. First use of flat-panel computed tomography (Dyna-CT) during cochlear implant surgery: perspectives for use of advanced therapies in cochlear implantation. HNO. 2017 Jan;65(1):61-65.
- Lang S, Mattheis S, Hasskamp P, Lawson G, Gueldner C, Mandapathil M, Schuler P, Hoffmann TK, Scheithauer MO, Remacle M. A European Multicenter Study Evaluating the Flex Robotic System in Transoral Robotic Surgery. Laryngoscope. 2017 Feb;127(2):391-395.
- Veit JA, Thierauf J, Egner K, Wiggenhauser S, Friedrich D, Scheithauer M, Greve J, Schuler PJ, Hoffmann TK, Schramm A. Virtuelle Planung bei der epithetischen Orbitaversorgung. LRO. 2017 Jun;96(6):374-379.
2016
- Hoffmann TK, Friedrich DT, Schuler PJ. Robotics in Head and Neck Surgery. Review. HNO. 2016. Sep;64(9):658-66.
2015
- Schuler PJ, Hoffmann TK, Greve J, Duvvuri U, Rotter N, Scheithauer MO. Demonstration of nasopharyngeal surgery with a single port operator controlled flexible endoscope system. Head & Neck. 2015 Mar;63(3):189-94.
- Schuler PJ, Scheithauer MO, Rotter N, Veit J, Duvvuri U, Hoffmann TK. A single port operator controlled flexible endoscope system for endoscopic skull base surgery. HNO. 2015 Mar;63(3):189-94.
- Friedrich DT, Scheithauer MO, Sommer F, Greve J, Hoffmann TK, Schuler PJ. Potential advantages of a single port operator controlled flexible endoscope system for transoral surgery of the larynx. Ann of ORL. 2015 Aug;124(8):655-62.
- Schuler PJ, Scheithauer MO, Duvvuri U, Friedrich D, Hoffmann TK. First use of an operator controlled flexible endoscope for transoral surgery. Case report. Laryngoscope. 2015. Mar;125(3):645-8.
2014
- Hoffmann TK* and Schuler PJ*, Bankfalvi A, Greve J, Heusgen L, Lang S, Mattheis S. Comparative analysis of resection tools suited for transoral robot-assisted surgery. *equal contribution. Eur Arch of ORL. 2014; 271(5):1207-13.
- Mattheis S, Schuler PJ, Dominas N, Lang S, Hoffmann TK. The use of a flexible CO2-laser fiber in transoral robotic surgery (TORS). Laryngorhinootologie. 2014; 93(2):95-9.